Alonso Marco
As a Senior Robotics/AI Engineer at Figure AI, I have been working in the controls team focusing on developing control algorithms for our humanoid robot fleet, Figure 02. My work involves designing and implementing controlled behaviors to improve the robot's capabilities during interactions with the environment. Additionally, I am involved in strengthening the control stack and creating machine learning algorithms to expedite various stages of the robot bring-up process.
Academic Background
Prior to my current role, I served as a postdoctoral research fellow at the Hybrid Systems Lab at the University of California Berkeley under the guidance of Prof. Claire J. Tomlin. During this time, my research focused on preventing unsafe behavior in autonomous systems navigating through complex real-world environments using out-of-distribution (OoD) run-time monitors.
I pursued my PhD in Computer Science at Max Planck Institute for Intelligent Systems in Tübingen, Germany, and the University of Southern California, under the supervision of Prof. Sebastian Trimpe and Prof. Philipp Hennig. My research during my PhD involved collaboration with esteemed professors such as Prof. Jeannette Bohg, Prof. Angela P. Schoellig, and Prof. Andreas Krause.
Research and Achievements
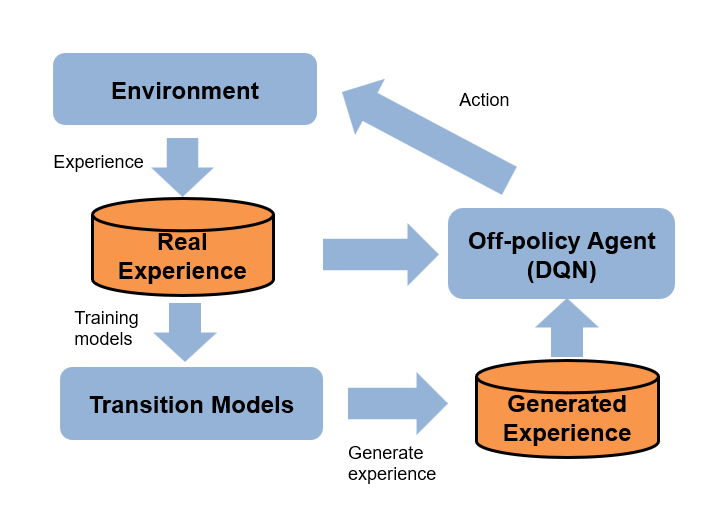
During my academic journey, I have been deeply involved in exploring data-efficiency in model-based reinforcement learning by integrating expert knowledge into probabilistic dynamics models. This includes utilizing physics models and high-fidelity simulators to enhance the performance of Gaussian process state-space models and Bayesian networks.
My passion lies in translating theoretically sound concepts into practical applications for real systems. I have gained hands-on experience with a variety of robotic systems including quadrupeds, hexapods, bipeds, and robot manipulators, enabling them to navigate and interact effectively in real-world scenarios.
Noteworthy Publications and Presentations
My research has led to the publication of various papers in prestigious conferences and journals. For instance, our paper on "Out of Distribution Detection via Domain-Informed Gaussian Process State Space Models" was presented at the 62nd IEEE Conference on Decision and Control (CDC) in Singapore.

I have also presented my work at renowned institutions such as the University of Cambridge and UC Berkeley, showcasing our advancements in the field of machine learning and robotics.



















